Getting started
Overview
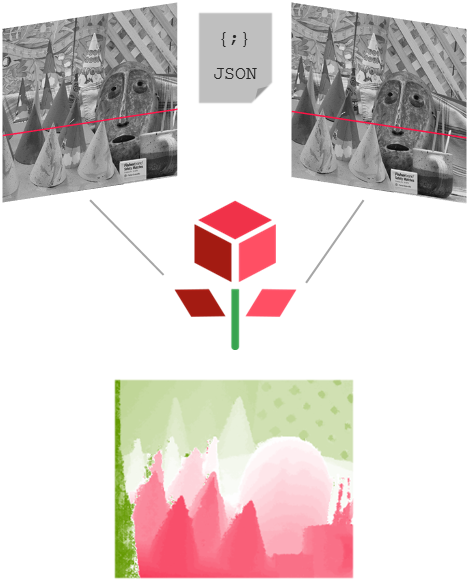
Pandora computes a disparity map from stereo rectified images
Pandora aims at shortening the path between a stereo-matching prototype and its industrialized version. By providing a modular pipeline inspired from the [Scharstein2002] taxonomy, it allows one to emulate, analyse and hopefully improve state of the art stereo algorithms with a few lines of code.
We (CNES) have actually been using Pandora to create the stereo matching pipeline for the CNES & Airbus CO3D off board processing chain. Leaning on Pandora’s versatility and a fast-paced constantly evolving field we are still calling this framework a work in progress !
Install
Pandora is available on Pypi and can be installed by:
pip install pandora #for the latest official release
For stereo reconstruction we invite you to install pandora and the required plugins using instead the following shortcut:
pip install pandora[sgm]
pip install pandora[mccnn]
First step
Pandora requires a config.json to declare the pipeline and the stereo pair of images to process. Use our data_sample.zip to start right away !
pip install pandora #install pandora latest release
wget https://raw.githubusercontent.com/CNES/Pandora/master/data_samples/images/cones.zip # input stereo pair
wget https://raw.githubusercontent.com/CNES/Pandora/master/data_samples/json_conf_files/a_local_block_matching.json # configuration file
unzip cones.zip #uncompress data
pandora a_local_block_matching.json output_dir #run pandora
Customize
To create you own stereo matching pipeline and choose among the variety of algorithms we provide, please consult Userguide
You will learn:
which stereo matching steps you can use and combine
how to quickly set up a Pandora pipeline
how to add your own private algorithms to customize your Pandora Framework
how to use Pandora API (see CARS for real life example)
Credits
Pandora uses transitions to manage the pipelines one can create. Images I/O are provided by rasterio and we use xarray to handle 3D Cost Volumes.
Our data test sample is based on the 2003 Middleburry dataset [Scharstein2003].
Scharstein D. & Szeliski R., 2002). Scharstein, D., & Szeliski, R. (2002). A taxonomy and evaluation of dense two-frame stereo correspondence algorithms. International journal of computer vision, 47(1-3), 7-42.
Scharstein D. & Szeliski R., 2003). Scharstein, D., & Szeliski, R. (2003, June). High-accuracy stereo depth maps using structured light. In 2003 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, 2003. Proceedings. (Vol. 1, pp. I-I). IEEE.
References
Please cite the following paper when using Pandora:
Cournet, M., Sarrazin, E., Dumas, L., Michel, J., Guinet, J., Youssefi, D., Defonte, V., Fardet, Q., 2020. Ground-truth generation and disparity estimation for optical satellite imagery. ISPRS - International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences.