Validation of the disparity map
Theoretical basics
Validation methods provide a confidence index on the calculated disparity, those available in pandora are
The cross checking ( cross checking [Fua1993] ), which allows to invalidate disparities. It consists in reversing the role of the images (the left image becomes the right image, and vice versa) and to compare the disparity
 (corresponding to the left image
(corresponding to the left image  ) with
) with  (corresponding to the right image
(corresponding to the right image  ) :
) :If
 , then point p is valid
, then point p is validIf
 , then point p is invalid
, then point p is invalid
The threshold is 1 by default, but it can be changed with the cross_checking_threshold parameter. Pandora will then distinguish between occlusion and mismatch by following the methodology outlined in [Hirschmuller2007]. For each pixel p of the left image invalidated by the cross-checking :
If there is a disparity d such as
 , it is a mismatch.
, it is a mismatch.Otherwise, it’s an occlusion.
Note
Cross checking does not modify the disparity map, it only informs bits 8 and 9 in the validity mask.
It is possible to fill in occlusions and mismatches detected during cross-validation:
using the method proposed in [Zbontar2016] : the disparity of an occluded pixel is modified using the first valid disparity from the left. The disparity of a pixel considered as a mismatch becomes the median of the first 16 valid pixels in the directions shown below (note: these directions are not related to the libSGM ):
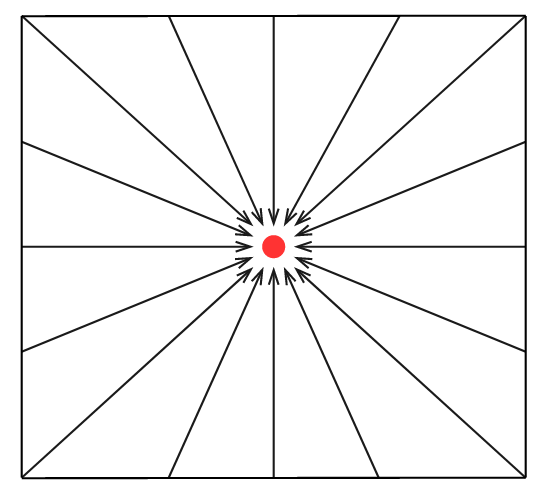
using the method proposed in [Hirschmuller2007] : the disparity of an occluded pixel is modified using the smallest disparity (the disparity closest to 0) in 8 directions. The disparity of a pixel considered to be a mismatch becomes the median of the first 8 valid pixels in the directions shown below. Mismatches that are direct neighbours of occluded pixel are treated as occlusions.

Note
The parameter interpolated_disparity is used to select the method to correct occlusions and mismatches.
Fua, P. (1993). A parallel stereo algorithm that produces dense depth maps and preserves image features. Machine vision and applications, 6(1), 35-49.
Configuration and parameters
Name |
Description |
Type |
Default value |
Available value |
Required |
|---|---|---|---|---|---|
validation_method |
Validation method |
str |
“cross_checking_accurate”, “cross_checking_fast” |
Yes |
|
cross_checking_threshold |
Threshold for cross-checking method |
int, float |
1.0 |
No |
|
interpolated_disparity |
Interpolation method for filling occlusion and mismatches |
str |
“mc_cnn”, “sgm” |
No |
Note
The cross_checking_fast method computes the right cost volume using the left cost volume, instead of re-running the entire pipeline. This results in faster run times, at the cost of accuracy when using optimization methods like SGM.
Note that when using the cross_checking_fast method, no disparity map for the right image will be returned :
using the CLI, no files for the right disparity will be created
using the Python API, an empty xr.Dataset will be returned
Example
{
"input" :
{
// ...
},
"pipeline" :
{
// ...
"validation":
{
"validation_method": "cross_checking_accurate"
}
// ...
}
}